Rethinking Display Safety: Why RISC-V-Supervised DisplayPort Subsystems Enable Secure, Isolated Automotive Architectures

As automotive displays become part of the safety surface, traditional host-dependent display architectures are showing their limits. In this article, Trilinear outlines how a RISC-V supervised DisplayPort subsystem can provide isolated control, deterministic fault handling, and a more auditable architecture for advanced automotive display platforms.
The cabin has become a distributed real-time video system, and video pipelines have become safety surfaces. This evolution shifts the question OEMs and Tier-1 suppliers must answer:
How do we deliver rich, high-bandwidth display experiences while maintaining strict fault isolation, cybersecurity integrity, and functional-safety discipline?
Traditional tightly coupled SoC graphics architectures, once favored for integration efficiency, now create shared-failure domains that are difficult to partition and certify. When a display feeds a safety function, “shared resources” can become “shared liability.”
Trilinear Technologies’ approach — a DisplayPort system supervised by an isolated RISC-V control core with dedicated HDCP, DSC, MST, and AUX management, fortified with Automotive Extensions for safety policy enforcement, redefines display control as a protected, deterministic, and independently recoverable function.
This architecture is already deployed in production automotive environments and is designed to transparently scale to zonal compute systems and next-generation DisplayPort capabilities.
The following sections explain why this architectural shift matters, and how Trilinear’s automotive system design delivers it.
1. The Automotive Display Explosion: Data, Density, and Determinism
Vehicle display count has grown dramatically
- Digital instrument clusters with real-time safety overlays
- AR head-up displays integrating navigation and ADAS cue
- Camera-based mirrors with ultra-low latency requirements
- Panoramic cockpit displays and passenger entertainment
- Surround-view and trailer-assist visualization systems
- Rear-seat infotainment and diagnostics panels
Each screen is a compute endpoint that requires:
- High-bandwidth video transport
- Content protection (HDCP)
- Deterministic timing
- Fast retraining and error recovery
- Configurable safety states
- Real-time diagnostics and logging
In this environment, displays must perform predictably even when the main SoC encounters:
- OS stalls or reboot cycles
- Application scheduler delays
- Memory bandwidth contention
- Power domain resets
- Heavy load from autonomy and perception stacks
A frozen frame in a streaming video environment is frustrating.
A frozen frame in a digital mirror or ADAS display is a safety event.
2. Why Host-Dependent Display Architectures Struggle in Automotive
The historical strategy: host CPU manages display link setup, training, timing, error handling, and HDCP is increasingly fragile when:
- Safety-critical and infotainment domains share compute
- Power management resets non-safety blocks
- Display timing must be deterministic
- Fault reporting must be granular and auditable
- Certification flows require transparency and isolation
Integrated SoC display control introduces risk:
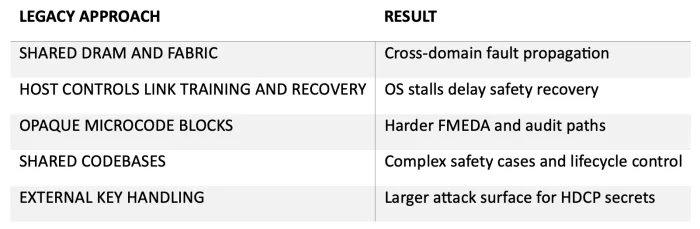
Scalability breaks down as display surfaces proliferate. Safety and cybersecurity requirements now demand fault independence, clear lifecycle control, and locally enforceable safety behavior.
This is not an optimization problem; it is an architectural one.
3. Trilinear’s Model: Isolation, Determinism, and Local Authority
Trilinear’s automotive DisplayPort system implements an isolated execution island for all link-critical functions, supervised by a dedicated 32-bit RISC-V core. The subsystem includes:
- DisplayPort 1.4a and 2.1 link management
- Independent HDCP key memory and cipher engines
- Display Stream Compression (DSC) encode/decode
- MST topology and bandwidth allocation
- Control-plane and AUX channel management
- Watchdog and low-latency interrupt handling
- Built-in diagnostic and debug tracing
This transforms the display controller from a peripheral managed by the host into a self-governing subsystem with predictable, auditable behavior.
4. Architecture Overview: Trilinear Automotive System Design
The processor and IP blocks inside the Trilinear subsystem operate together to provide full DisplayPort management without host dependency. Core elements include:
- 32-bit RISC-V CPU — dedicated control plane and safety supervision
- AHB-4 / APB-4 interconnect — memory-mapped IP access
- Embedded HDCP key SRAM — secure internal secrets storage
- HDCP 1.x / 2.x engine — content protection enforcement
- DSC 1.2 encoder / decoder — efficient high-resolution bandwidth usage
- SST / MST controller — up to four virtual sink/source devices
- Dedicated interrupt controller — low-latency safety event handling
- Serial I/O interfaces — debug, code download, and trace
The embedded execution environment supports:
- Interrupt-driven scheduling
- Optional RTOS or bare-metal execution
- Low-latency servicing
- Real-time fault handling
- Secure, local firmware control
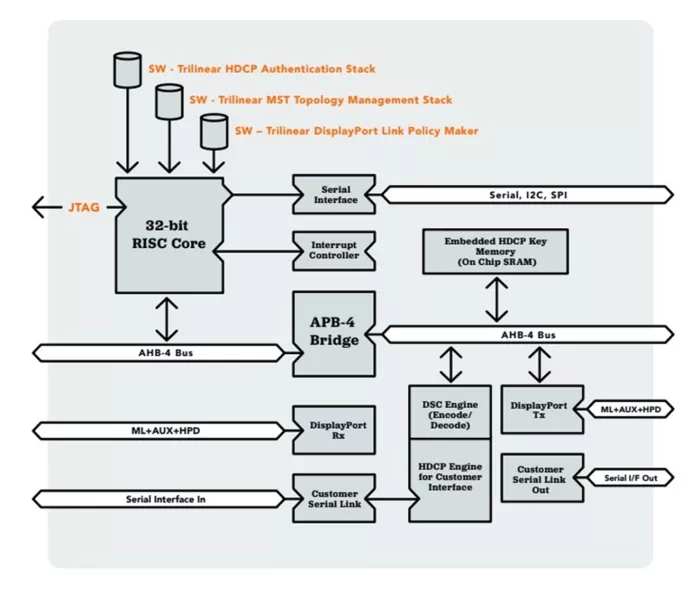
Figure 1 — Automotive Display System with RISC-V Supervised DisplayPort Subsystem
5. Automotive Extensions: Policy, Safety, and Auditability
The DisplayPort Automotive Extensions (DP-AE) framework brings structured safety behavior:
- Configurable safety policies
- CRC-protected link supervision
- Deterministic safe-state behavior
- Diagnostic patterns or freeze-frame modes
- Event logging and trace export
DP-AE profiles align with scalable functional-safety needs, allowing design teams to match system architecture to safety goals.
Rather than treating safety as a single binary state, Trilinear provides a graduated safety envelope.
6. Fault Behavior: Design for Predictability
A display safety solution must fail the right way.
Under fault or degradation, the subsystem:
- Detects errors through counters and CRC monitoring
- Escalates based on pre-defined policy
- Acts autonomously, without waiting for host instructions
- Maintains video if possible, falls back safely when not
- Records events for FMEDA and post-event analysis
Supported fallback behaviors include:
- Freeze-frame activation
- Diagnostic grid or safety pattern display
- Blanking to known safe state
- Local retraining with time-bounded watchdog enforcement
This makes the safety case clear, auditable, and deterministic.
7. Verification and Compliance Discipline
Automotive customers require not only features, but evidence. Trilinear’s validation pipeline includes:
- Corner-case and randomized simulation
- FPGA-based prototyping (Cobra platform)
- VESA compliance for DisplayPort, HDCP, and DSC
- Automotive software developed MISRA compliant
- Static and dynamic code analysis aligned with ISO26262
- Fault injection and watchdog analysis
- Real-world interoperability and stress testing
This enables OEMs and Tier-1s to integrate a subsystem that has been tested not merely “in theory,” but in silicon, in production systems.
8. Why RISC-V (When It Matters)
Trilinear does not emphasize RISC-V for marketing effect — it’s used because:
- It’s a transparent, auditable ISA
- There is no opaque microcode or hidden execution
- Deterministic behavior is reviewable and certifiable
- Memory mapping and execution ranges are lockable
- It supports secure-boot and controlled firmware lifecycle
This transparency benefits safety review, formal analysis, and long-term maintenance.
When needed, we speak of it directly. When selling to safety teams, we emphasize the isolated microcontroller domain and lifecycle control.
Either way, the design intent is clear: trusted execution needs visibility and independence.
9. Field Deployment and Ecosystem Maturity
Trilinear’s architecture is not a lab concept — it is shipping in automotive systems today, scaling across:
- Multiple process nodes from 28 nm to 7 nm
- Multiple PHY partners including Cadence, Silicon Creations, M31 and Naneng
- Multiple platform types including ASIC and FPGA variants
Customers use this architecture to:
- Reduce functional-safety effort by constraining shared resources
- Improve system recovery behavior under stress
- Partition infotainment from safety-visualization jobs
- Protect content and secure video pathways
- Future-proof architectures for zonal compute models
This is field-validated, not speculative.
10. Designed for Zonal Compute and Future Displays
The industry trajectory is clear:
- Zoned control replacing central compute
- Distributed microcontroller domains
- Increasing reliance on camera vision and display feedback
- OTA and lifecycle separation requirements
- Higher display bandwidth and link complexit
Trilinear’s roadmap matches that future:
- DisplayPort 2.1a evolution
- Extended AE safety profiles
- Enhanced security layers and secure messaging
- OTA-compatible isolated firmware update hooks
- Multi-link supervisory capabilities for zonal gateways
This is infrastructure for a modular, auditable, future-proof display world.
11. Architecture Impact Summary
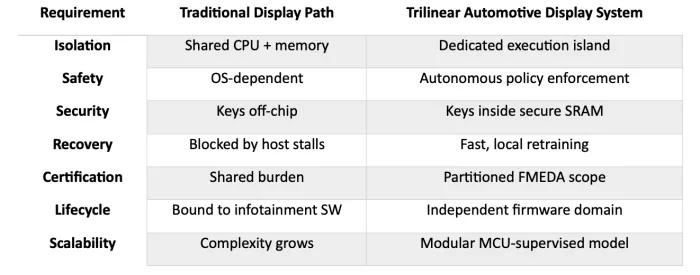
12. Conclusion: Separation as a Safety Primitive
Automotive display systems have crossed the boundary from convenience to criticality. Safety cases must assume the main SoC will:
- Reset
- Stall
- Be power-gated
- Be saturated by autonomy workloads
- Undergo OTA changes during the product lifecycle
When the host falters, the display system must not.
Trilinear’s RISC-V-supervised DisplayPort subsystem delivers:
- Architectural isolation
- Deterministic timing
- Policy-driven safety behavior
- Secure key handling
- Independent firmware control
- Field-proven reliability
Displays are now safety components. That demands independence, not faith in shared systems.
Where vision matters, separation is security and separation is exactly how Trilinear designs.
Related Semiconductor IP
- DisplayPort Receiver IP
- DisplayPort Transmitter IP
- 4-port Receiver/Transmitter/Repeater HDCP 2.3 on HDMI 2.0 and/or DisplayPort 2.0/1.4 ESM (generation 3)
- VESA DisplayPort 1.4 Forward Error Correction (FEC) Transmitter
- DisplayPort Receiver IP
Related Blogs
- Why we've created a safety-critical driver for automotive GPU acceleration
- High Resolution Displays for Mobile, TV, PC and Automotive Enabled by DSC 1.2 in HDMI 2.1
- Backbone of Automotive Safety Systems
- MIPI Automotive Display Stack Paves the Way for Next-Generation Automotive Displays
Latest Blogs
- Implementing Dual-core Lockstep in the CHIPS Alliance VeeR EL2 RISC-V core for safety-critical applications
- Rethinking Display Safety: Why RISC-V-Supervised DisplayPort Subsystems Enable Secure, Isolated Automotive Architectures
- Area, Pipelining, Integration: A Comparison of SHA-2 and SHA-3 for embedded Systems.
- Why Your Next Smartphone Needs Micro-Cooling
- Teaching AI Agents to Speak Hardware