The Evolution of AI and ML- Enhanced Advanced Driver Systems

Advanced Driver Assistance Systems (ADAS) are rapidly transforming our vehicles. But how did they go from simple warnings to intelligent co-pilots?
This blog delves into the profound impact of Artificial Intelligence (AI) and Machine Learning (ML) on ADAS, tracing their evolution from basic, rule-based functions to sophisticated systems that can learn and adapt to dynamic driving environments. We’ll explore the diverse AI techniques powering these advancements and examine the critical challenges of ensuring their reliability and performance on the road.
Brief History of ADAS (1970s → Present)
Advanced Driver Assistance Systems (ADAS) have a rich history that spans over five decades. Their evolution reflects a gradual shift from simple, deterministic control systems to today’s AI-driven, perception-heavy modules.
1970s–1990s: Control-Oriented Safety Systems
- 1971: Japan’s Honda develops an early form of lane-keeping aid in experimental research vehicles.
- 1978: Anti-lock Braking System (ABS) becomes the first commercial ADAS, launched by Mercedes-Benz in the S-Class, allowing controlled braking to prevent skidding.
- 1995: Electronic Stability Control (ESC) is introduced, combining ABS and traction control to help prevent under- and over-steering.
These early systems used deterministic control loops and physical sensor thresholds, not AI or rule-based software.
2000s: Sensor-Based Assistive Features Emerge
- Adaptive Cruise Control (ACC) uses radar to maintain a safe distance from vehicles ahead.
- Lane Departure Warning (LDW) systems begin to appear, relying on cameras to detect lane markings.
- Blind Spot Detection and Parking Assist systems become standard in premium models.
These were rule-based systems, governed by fixed thresholds and logic trees, not yet intelligent or learning-based.
2010s: Shift Toward Perception and Decision-Making
- The fusion of camera, radar, and LiDAR is becoming more common.
- Automakers introduce Automatic Emergency Braking (AEB) and Traffic Sign Recognition, powered by basic computer vision.
- Tesla’s Autopilot and Mobileye’s vision-based systems lead semi-autonomous driving efforts.
2020s–Present: AI-Driven ADAS
- Deep learning models power perception modules for object detection, scene segmentation, and path planning.
- Multimodal fusion combines sensor inputs to form unified environmental models.
- AI models begin to predict human behavior (e.g., lane changes, braking intent).
- Research includes reinforcement learning, intention prediction, and real-time 3D mapping.
This transition marks a paradigm shift from solely physics-based control to a combination of physics and learning-based adaptive control in ADAS. This evolution enables more adaptive and intelligent driving assistance, as learning systems primarily enhance the responsiveness and nuance of control.
Introduction to ADAS and AI
Advanced Driver Assistance Systems (ADAS) have significantly evolved, building upon their foundational deterministic control loops—like Anti-lock Braking Systems (ABS) and Electronic Stability Control (ESC)—to integrate sophisticated, learning-based perception and planning modules powered by Artificial Intelligence (AI) and Machine Learning (ML). In safety-driven systems like ADAS, determinism remains absolutely critical. ML’s role is to allow for data-driven fine-tuning of these deterministic controls, thereby enabling more nuanced behavior and expanding the control bandwidth for enhanced performance. These advancements have enabled vehicles to perform complex tasks such as lane departure warnings, automatic emergency braking, and adaptive cruise control. AI integration allows these systems to process vast amounts of sensor data, make informed decisions, and execute actions in real time, thereby enhancing overall driving safety and convenience.
AI Techniques in ADAS
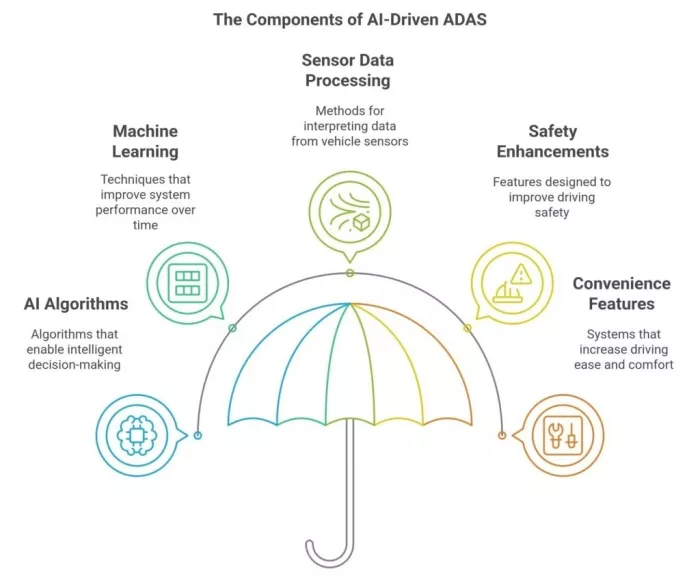
ADAS uses various AI techniques to interpret and respond effectively to the driving environment. Key methodologies include:
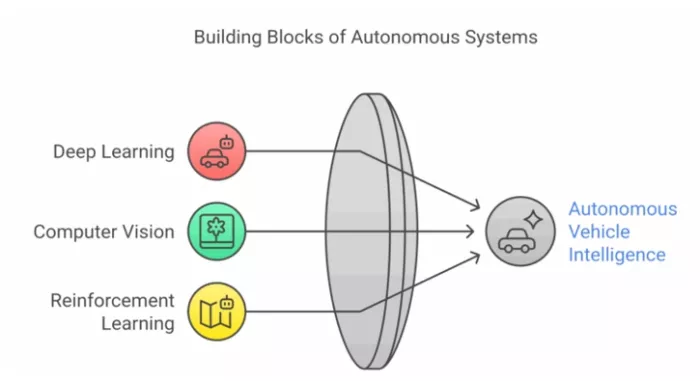
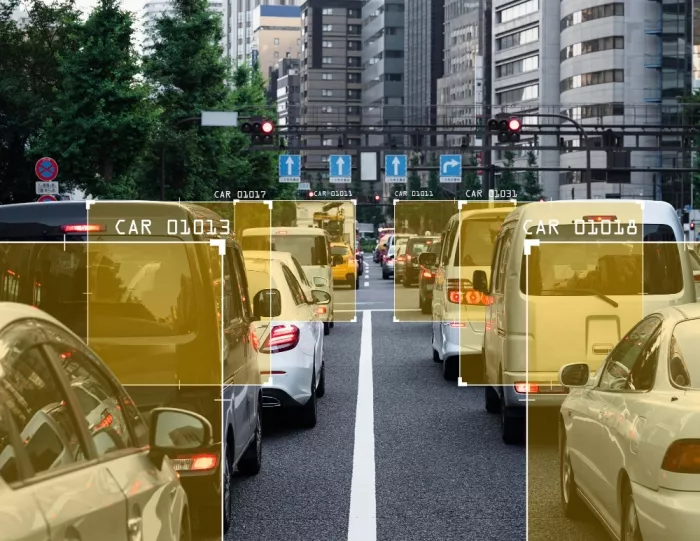
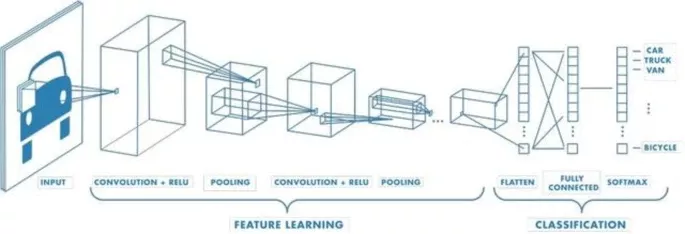
- Deep Learning: Deep learning, particularly through convolutional neural networks (CNNs), is widely used for image and pattern recognition in ADAS. It enables the detection and classification of objects such as pedestrians, vehicles, traffic signs, and lane markings—often as part of a computer vision pipeline.
- Computer Vision: Computer vision, powered by deep learning, interprets visual data from cameras and other sensors to build a semantic understanding of the vehicle’s environment. This includes detecting road features, tracking dynamic objects, and supporting decision-making in real time.
- Reinforcement Learning (RL): This approach allows systems to learn from their experiences by receiving feedback from their actions, improving decision-making capabilities over time. While promising, RL is currently mostly explored in simulation and limited pilot settings due to the high safety and verification requirements for on-road deployment. As a result, mass-production ADAS currently relies more on supervised and imitation learning techniques, which offer greater predictability and traceability.
These techniques work in tandem to create a robust framework that enhances the vehicle’s ability to navigate complex driving scenarios.
How AI Enhances ADAS Functionality: A Modular Approach
Traditional ADAS relied on rule-based algorithms with hardcoded instructions for vehicle behavior. While these systems worked well in predictable environments, they struggled with complex and dynamic road scenarios. AI and machine learning (ML) have transformed ADAS by making it:
-
Adaptive – AI-based systems can learn from vast datasets and improve over time.
-
Real-time Processing of Complexity – AI can interpret intricate sensor data and generate appropriate responses for complex and dynamic real-time driving scenarios.
-
Predictive (in specific contexts) – Machine learning models can anticipate certain short-term behaviors (e.g., driver intent, pedestrian trajectories) and road conditions, moving beyond purely reactive responses.
So, why do we need AI-driven ADAS?
What limitations did traditional, rule-based systems face that necessitated this shift?
Key Features:
1. Perception: Understanding the World
This is where AI, particularly deep learning, has made the most significant impact.
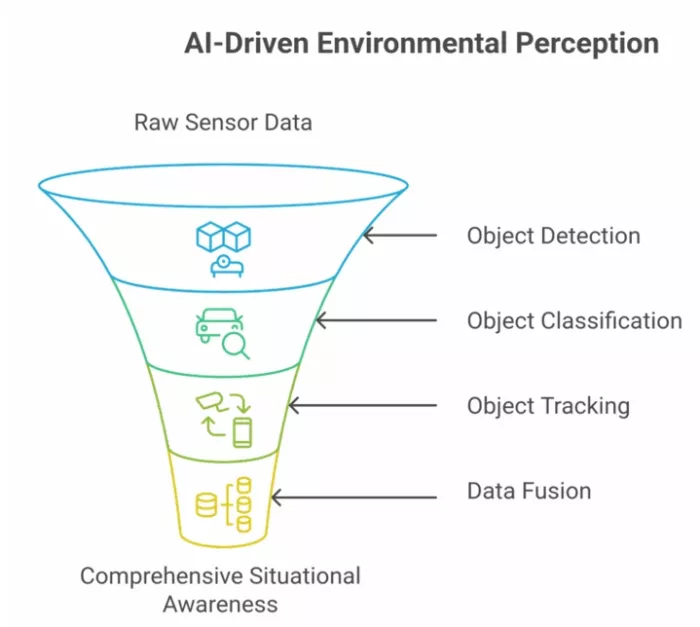
Role of Perception: To accurately understand the vehicle’s surroundings by detecting, classifying, and tracking objects (vehicles, pedestrians, cyclists, traffic signs), identifying lane markings, and understanding road conditions.
AI’s Value Add:
-
Robust Object Detection & Classification (CNNs): Instead of hand-engineered features, deep learning models (e.g., CNNs like YOLO, Faster R-CNN) learn complex patterns directly from vast datasets, leading to far more accurate and robust detection of diverse objects under varying conditions (lighting, weather, occlusion). This includes capabilities like Computer Vision for Object Detection as discussed.
-
Semantic & Instance Segmentation: AI allows for pixel-level understanding of the scene (e.g., segmenting road, sky, buildings, drivable areas, individual objects). This provides a rich, fine-grained environmental model crucial for safe navigation.
-
Multi-modal Sensor Fusion: Deep learning models can effectively fuse data from heterogeneous sensors (cameras, LiDAR, radar) at different levels (raw, feature, object-level) to overcome individual sensor limitations, provide more robust object lists (position, velocity, class, uncertainty), and enhance situational awareness. This directly relates to the Sensor Fusion for Situational Awareness point.
-
3D Reconstruction & Occupancy Grids: AI models can build detailed 3D representations of the environment, crucial for understanding free space and potential obstacles.
Reference link: https://www.nature.com/articles/s41598-025-91293-5
2. Planning: Deciding the Path Forward
Role of Planning: To determine the safest, most efficient, and comfortable trajectory for the vehicle, considering perceived objects, traffic rules, driver intent, and dynamic scenarios.
AI’s Value Add:
-
Behavior Prediction (Learning-based): While true long-term prediction is still nascent, ML models excel at predicting short-term behavior of other road users (e.g., predicting a pedestrian’s next few steps, another vehicle’s lane change intent) based on learned patterns from extensive real-world data. This significantly improves proactive decision-making.
-
Scenario-based Decision Making: AI, sometimes using reinforcement learning or inverse reinforcement learning (though more common in simulation/research), can help learn optimal driving policies for complex, ambiguous scenarios that are difficult to hard-code (e.g., yielding in complex intersections, merging gracefully in dense traffic).
-
Path Optimization: ML can optimize paths for comfort and fuel efficiency, beyond purely geometric considerations, by learning preferred human driving styles.
3. Control: Executing the Action
Role of Control: To execute the planned trajectory by sending precise commands to the vehicle’s actuators (steering, acceleration, braking).
AI’s Value Add (Data-Driven Fine-Tuning):
-
Adaptive Control Parameters: ML can be used to adaptively tune the parameters of underlying deterministic physics-based controllers (e.g., PID controllers). By analyzing real-time vehicle dynamics and environmental conditions, ML models can learn to adjust control gains to achieve smoother, more precise, or more responsive maneuvers than fixed parameters would allow.
Improved Responsiveness & Nuance: ML allows for data-driven fine-tuning of deterministic control, providing more control bandwidth and enabling the system to react with greater nuance to dynamic changes, often leading to a more natural and comfortable driving experience.
End-to-End (E2E) Machine Learning AD Stacks
Beyond modular approaches, a paradigm gaining significant traction is the End-to-End (E2E) Machine Learning AD stack. This approach moves away from explicitly defined Perception, Planning, and Control modules in favor of a single, large, deep neural network that directly learns to map raw sensor data to driving actions.
- Concept: The E2E system takes raw sensor inputs (e.g., camera images, LiDAR point clouds) and, often, a high-level navigational command, and directly outputs low-level control commands (steering angle, acceleration/deceleration).
- AI’s Role: A massive deep learning model learns the entire driving policy, including perception, prediction, and planning, directly from vast amounts of recorded driving data (often augmented with human driving actions). This approach aims to leverage the power of deep learning to find optimal, non-linear relationships across the entire driving task, potentially leading to more human-like and robust driving in complex scenarios.
- Advantages: Potentially simpler architecture, better handling of complex scenarios due to holistic learning, and more human-like driving.
- Challenges: Explainability (black box), data hunger, difficulty in verification and validation, and ensuring robustness across all edge cases.
Challenges in AI-Driven ADAS: Performance, Verification & Validation
AI is revolutionizing Advanced Driver Assistance Systems (ADAS), enabling vehicles to perceive, decide, and act with increasing autonomy. However, the same flexibility that empowers these systems also introduces complex challenges related to performance, safety assurance, and verification and validation (V&V). Below are key technical, operational, and regulatory hurdles developers must overcome:
1. Data Quality, Quantity & Diversity
AI systems rely on vast and diverse datasets for training and validation. Inconsistent, biased, or incomplete data can degrade performance, especially when encountering unfamiliar conditions. Data must span a wide range of road types, lighting conditions, weather, traffic patterns, and cultural driving behaviors.
To address gaps, developers increasingly use synthetic data and adversarial generation techniques to simulate rare or dangerous scenarios and improve model robustness.
2. Data & Compute Needs
Beyond the quality and diversity of data, the sheer volume of data required for training advanced ADAS models is enormous, often measured in petabytes. This necessitates sophisticated infrastructure for data collection, storage, and management. Furthermore, the complexity of these models (e.g., deep neural networks with billions of parameters) demands immense computational resources for training. This typically involves large clusters of specialized hardware like Graphics Processing Units (GPUs) or Tensor Processing Units (TPUs), which are energy-intensive and expensive to acquire and operate. The continuous retraining and fine-tuning of these models to adapt to new scenarios or improve performance further exacerbate these computational demands.
3. Environmental Variability
ADAS must operate reliably under varied conditions such as rain, fog, night-time, or construction zones—each affecting sensor performance and perception accuracy. Ensuring consistent behavior across this variability requires stress testing with edge cases in both real-world and virtual test environments.
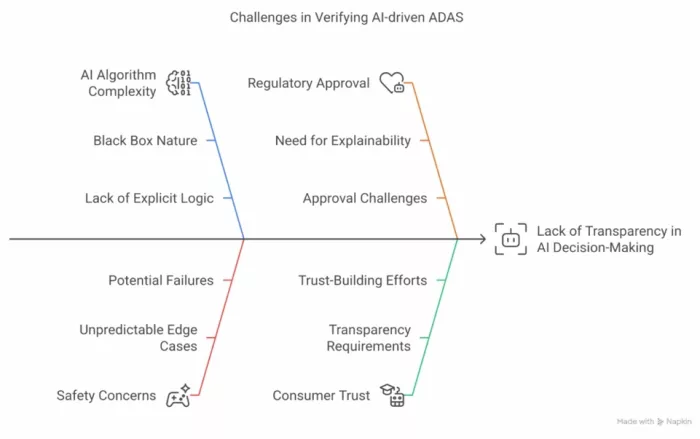
4. Algorithm Transparency and Explainability
AI systems, especially deep learning models, often function as “black boxes.” Their decision-making processes are difficult to interpret, which complicates both debugging and regulatory approval. Explainable AI (XAI) is crucial to build trust and validate how decisions are made, especially in life-critical situations. Safety-case-driven explainability is becoming a best practice to document behavior in traceable, auditable formats.
5. Operational Design Domain (ODD) Coverage
Each ADAS feature is intended to function within a defined ODD, specifying conditions like road type, traffic density, weather, and speed. Proving that the system remains safe within this envelope and handles excursions beyond it with graceful fallback behavior is a major V&V task. Testing must include:
- Scenario-based testing across the ODD spectrum
- Boundary condition analysis
- Onboard monitoring to detect and respond to ODD breaches
6. Edge Case Robustness
Uncommon or unexpected driving situations (e.g., erratic pedestrians, unusual signage, or emergency maneuvers) can expose weaknesses in AI models. These “edge cases” are difficult to capture in datasets and require extensive simulation and adversarial testing to ensure system resilience.
7. Safety and Cybersecurity
AI-driven systems increase software complexity, which in turn expands the attack surface. They must comply with functional safety standards (e.g., ISO 26262), cybersecurity frameworks, and the Safety of the Intended Functionality (SOTIF). Balancing AI innovation with these safety constraints is a key challenge for automotive developers.
8. Regulatory and Ethical Considerations
Regulatory frameworks have not fully kept pace with the rapid evolution of AI in ADAS. Uncertainty remains around certification, legal liability, and ethical dilemmas (e.g., how to handle unavoidable collisions). Guidelines such as ISO/TR 4804 (ADS safety) and UL 4600 (autonomous system safety) are emerging, but global harmonization is ongoing.
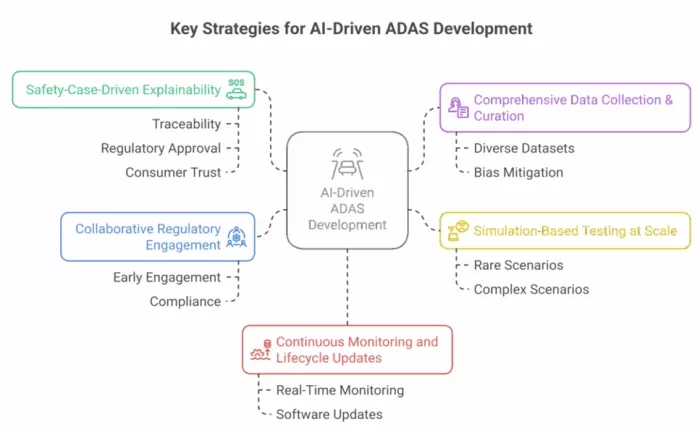
The Path Forward: Best Practices for AI V&V in ADAS
To ensure safe and reliable deployment of AI-powered ADAS, the industry must adopt a multi-pronged approach to validation and governance:
- Safety-Case-Driven Explainability
Embed explainable decision-making within the safety case, supporting traceability, regulatory approval, and consumer trust.
- Comprehensive Data Collection & Curation
Develop diverse, representative datasets and mitigate bias to improve AI model generalization across all driving scenarios.
- Simulation-Based Testing at Scale
Leverage virtual testing environments to simulate rare and complex scenarios not easily captured in real-world testing.
- Collaborative Regulatory Engagement
Work with regulatory bodies from the early stages to shape and comply with evolving safety and performance standards.
- Continuous Monitoring and Lifecycle Updates
Post-deployment, implement real-time monitoring and regular software updates to adapt to changing environments and new threats.
Conclusion
The journey of Advanced Driver Assistance Systems, from rudimentary control mechanisms to today’s AI-driven powerhouses, showcases a remarkable evolution in automotive technology. By integrating artificial intelligence and machine learning, ADAS has transformed from systems that merely assist to those that can perceive, learn, and adapt to the complexities of real-world driving. While the path to fully autonomous vehicles still presents significant challenges in performance, verification, and ethical considerations, the continuous advancements in AI techniques, coupled with rigorous validation methodologies and collaborative industry efforts, are paving the way for safer, more efficient, and ultimately, more intelligent driving experiences. The future of ADAS is undoubtedly intertwined with the ongoing breakthroughs in AI, promising a transformative impact on road safety and the very nature of driving.
Related Semiconductor IP
- Camera Post-Processing IP
- DC-DC Split-Pi Boost-Buck Converter
- Deep learning accelerator
- MIL-STD-1553 Controller IP
- UFS 5.x Device IP
Related Blogs
- The Architectural Evolution of 16GHz PLLs for Next-Gen AI and SerDes SoCs
- The Architectural Evolution of 16GHz PLLs for Next-Gen AI and SerDes SoCs
- MIPS and GlobalFoundries: Powering the Next Wave of Physical AI
- UEC-LLR: The Future of Loss Recovery in Ethernet for AI and HPC
Latest Blogs
- NVMe 2.0 Explained: What’s New and Why It Matters
- Understanding USB4 Retimers and Their Role in Gen2 and Gen3 - Link Training
- Reducing Avoidable Memory Trips In HBM Systems
- Enabling the Next Generation of AI Infrastructure with Ethernet for Scale-Up Networking (ESUN)
- Why DACs are so crucial in modern chip design