Tensilica助力汽车雷达开发
Paul McLellan, Cadence
在Linley Fall处ç†å™¨å¤§ä¼šä¸Šï¼ŒCadenceçš„David Bell展示了如何利用Tensilica ConnX DSP实现汽车雷达处ç†çš„定制化。
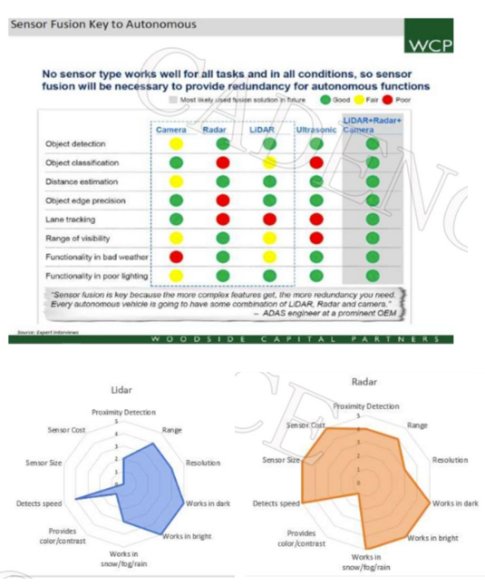
适åˆæ±½è½¦åº”ç”¨çš„ä¼ æ„Ÿå™¨ä¸»è¦æœ‰å››ç§ç±»åž‹ï¼šç›¸æœºã€æ¿€å…‰é›·è¾¾ã€æ¯«ç±³æ³¢é›·è¾¾å’Œè¶…å£°æ³¢ã€‚å¦‚ä¸Šå›¾æ‰€ç¤ºï¼Œè¿™äº›ä¼ æ„Ÿå™¨å„有优缺点。ä¸è¿‡ï¼Œå„ç±»ä¼ æ„Ÿå™¨æ˜¯äº’è¡¥çš„ï¼Œç»„åˆä½¿ç”¨å°±èƒ½åœ¨å„项å‚æ•°æŒ‡æ ‡æ‹¿åˆ°“全绿”。上方橙色蜘蛛图展示了雷达的优缺点,这是David演讲的é‡ç‚¹ã€‚
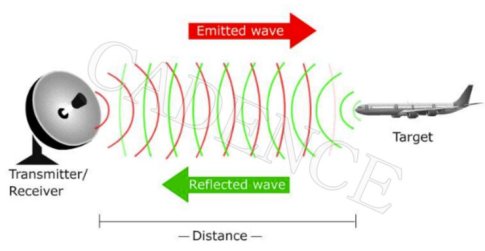
雷达的基本原ç†å¦‚上图所示。雷达å‘å°„æ³¢æŸï¼Œæ³¢è¢«ç‰©ä½“å射,然åŽå射回æ¥ç”±é›·è¾¾è¿›è¡Œåˆ†æžã€‚
通过å¤æ‚çš„æ•°å—ä¿¡å·å¤„ç†ï¼Œæˆ‘们从雷达获å–三项所需的数æ®ï¼š
- è·ç¦»åˆ¤æ–ï¼šç›®æ ‡æœ‰å¤šè¿œ?
- é€Ÿåº¦æµ‹å®šï¼šç›®æ ‡ç›¸å¯¹äºŽé›·è¾¾çš„è¿åŠ¨é€Ÿåº¦æœ‰å¤šå¿«?
- è§’åº¦æµ‹å®šï¼šç›®æ ‡åœ¨ä»€ä¹ˆæ–¹å‘上è¿åŠ¨?
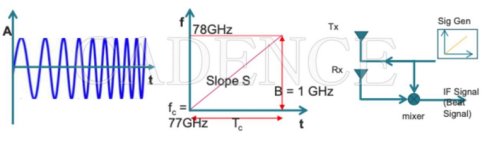
利用调频连ç»æ³¢(frequency modulated continuous wave, FMCW)雷达,我们å¯ä»¥ç¡®å®šè¿™ä¸‰é¡¹å‚数。一个FMCW调频周期是一个å¯å˜é¢‘率,在本例ä¸é›·è¾¾çš„范围是77GHz到78GHz。
三者ä¸æœ€ç®€å•çš„是è·ç¦»åˆ¤å®šã€‚åå°„ä¿¡å·ä»Žå‘å°„ä¿¡å·çš„延迟å¯ä»¥ç›´æŽ¥ç”¨æ¥è®¡ç®—往返时间,从而计算到物体的è·ç¦»ï¼ˆåŸºäºŽå…‰é€Ÿï¼‰ã€‚
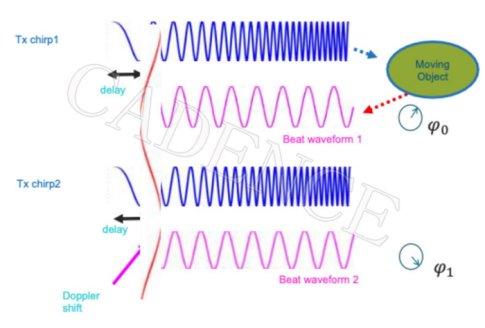
è¦æµ‹é‡ç›®æ ‡çš„速度,雷达需è¦å‘é€ä¸¤ä¸ªè°ƒé¢‘ä¿¡å·ã€‚ä¸é¢‘ä¿¡å·åœ¨çº¿æ€§è°ƒé¢‘之间的相ä½å˜åŒ–ä¼šå¯¹åº”ç›®æ ‡çš„é€Ÿåº¦ï¼ˆåœ¨å•ä¸ªçº¿æ€§è°ƒé¢‘æŒç»æ—¶é—´å†…ç›®æ ‡ä½ç½®çš„å˜åŒ–)。
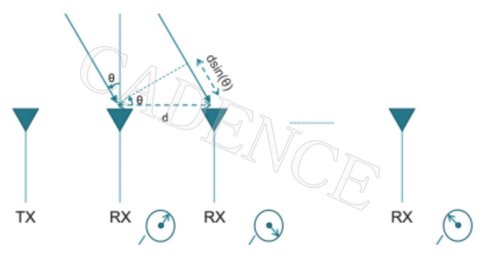
角度测定是最å¤æ‚çš„å‚数。它需è¦ä¸¤ä¸ªæˆ–更多的接收天线,æ‰èƒ½è®¡ç®—出两个天线处接收信å·ä¹‹é—´çš„相ä½å·®ã€‚
Tensilica ConnX DSP产å“家æ—

上述列出了Tensilica家æ—从音频到视觉,å†åˆ°äººå·¥æ™ºèƒ½çš„完整产å“。红色圈出的是ConnX DSP家æ—,用于雷达ã€æ¿€å…‰é›·è¾¾å’Œé€šä¿¡ã€‚
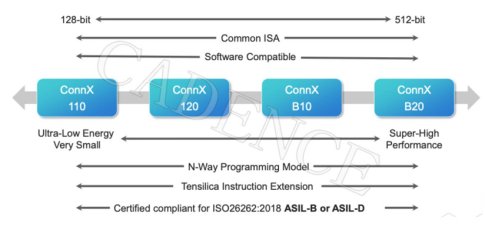
上图展示了Tensilica ConnX DSP家æ—的所有产å“。120å’Œ110都是新产å“。所有产å“软件互相兼容。处ç†å™¨å·²é€šè¿‡ISO 26262 ASIL-B或ASIL-D认è¯ã€‚
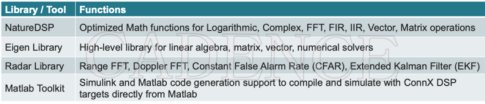
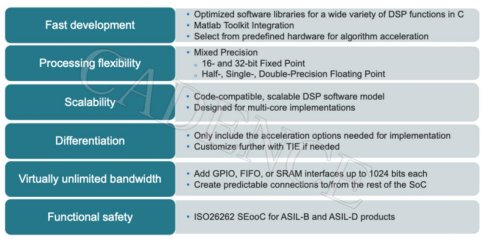
上é¢åˆ—出了适用于ConnX处ç†å™¨çš„软件库。
An Example
案例
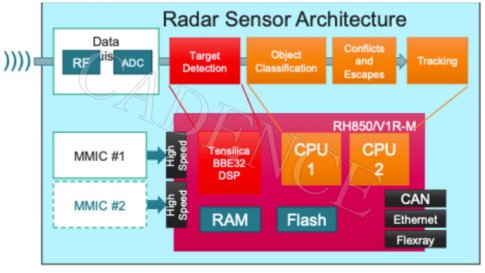
ä¸Šå›¾æ‰€ç¤ºä¸ºç‘žè¨ RH850/V1R-M 使用旧版 Tensilica BBE32 æ ¸å¿ƒçš„å®žä¾‹ã€‚
总结
了解更多
如需了解更多信æ¯ï¼Œè¯·å‚è§ ConnX DSP 产å“页é¢https://www.cadence.com/en_US/home/tools/ip/tensilica-ip/connx-dsps.html
Related Semiconductor IP
- Very fast VMAF accelerator
- AV1 Video Encoder IP
- TSMC CLN3FFP HBM4 PHY
- CAN 2.0/CAN FD IP core
- Multi-Channel AXI DMA Engine