Automotive IP
Automotive IP cores support a range of protocols critical to automotive applications, including CAN IP, CAN XL IP, CAN-FD IP, FlexRay IP, LIN IP, Safe Ethernet IP, and SafeSPI IP. CAN IP and CAN-FD IP facilitate reliable in-vehicle communication, while CAN XL IP extends bandwidth for high-performance data transfer. FlexRay IP is used for high-speed, fault-tolerant communication in safety-critical systems, and LIN IP supports cost-effective communication in simpler applications. Safe Ethernet IP and SafeSPI IP ensure secure and fault-tolerant data transmission, meeting stringent automotive safety standards.
Explore our vast directory of Automotive IP cores below.
All offers in
Automotive IP
Filter
Compare
86
Automotive IP
from
29
vendors
(1
-
10)
-
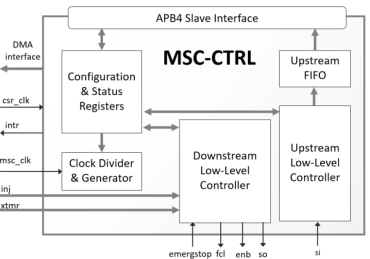
Microsecond Channel (MSC/MSC-Plus) Controller
- The MSC-CTRL IP core implements a high-speed serial interface controller designed to connect a microcontroller or SoC to external power devices or sensors.
- It implements the Microsecond Channel (MSC) and Microsecond Channel Plus (MSC-Plus) protocols—derived from the Microsecond Bus (uSB) serial concept—and acts as a bus master for downstream transmission and as a bus slave for upstream transmission.
-
3.3V CAN Transceiver
- The TS_CAN_3V3_X8 is a 3.3V CAN transceiver, which supports data rates up to 1Mbps and is compatible with ISO 11898-2 compliant CAN transceivers.
- It supports a standby mode with wake up via wake-up pattern.
- The TS_CAN_3V3_X8 provides a symmetrical output signal on CANL/CANH and incorporates slope-control to improve EMI performance.
-
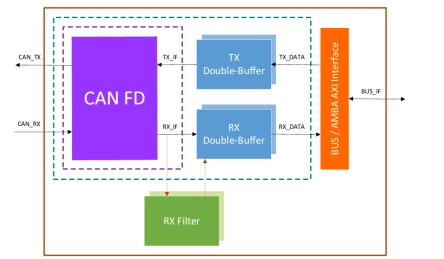
CAN-FD Controller
- The Controller Area Network (CAN) is a highly reliable serial bus protocol defined in the Bosch CAN specifications for standard CAN 2.0B and CAN FD, as well as ISO 11898-1:2024.
- The TES CAN Flexible Data-Rate Controller IP core is a Hardware IP core written in VHDL.
-
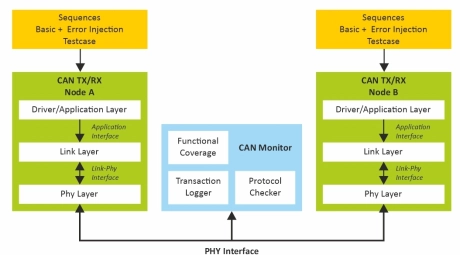
CAN XL Verification IP
- The CAN XL Verification IP provides an effective & efficient way to verify the CAN components of an IP or SoC.
- The CAN XL VIP is fully compliant with CAN XL specifications (CiA 610-1, CiA 610-3, 11898-1 2024, 11898-2 2024, CiA 611-1).
- The VIP is light weight with easy plug-and-play components so that there is no hit on the design cycle time.
-
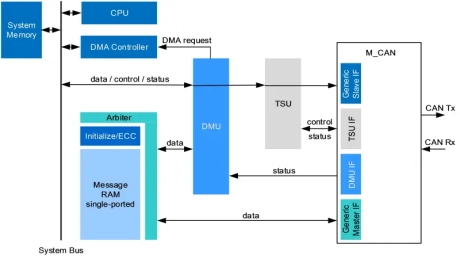
DMA Unit
- The DMU signals to the attached DMA Controller (DMA request) when there is a newly received message available at one of the attached M_CAN's Rx FIFOs respectively when there is the possibility to load a new Tx message into the M_CAN's Tx FIFO/Queue.
- The DMA controller then autonomously transfers the received message from the M_CAN's Message RAM to the System Memory or the message to be transmitted from the System Memory to the M_CAN's Message RAM.
-
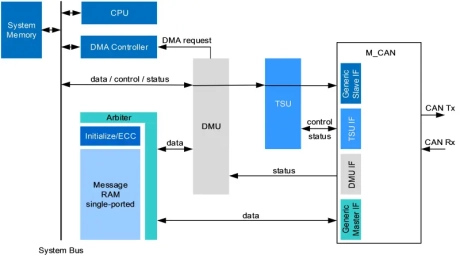
Timestamping unit
- Supports DMA transfers between M_CAN Message RAM and System Memory
- Up to sixteen 32-bit timestamps supported by TSU
- On reception or transmission of sync messages by the attached M_CAN, the TSU captures the actual value of its internal 32-bit timestamp counter and stores it to one of its timestamp registers.
-
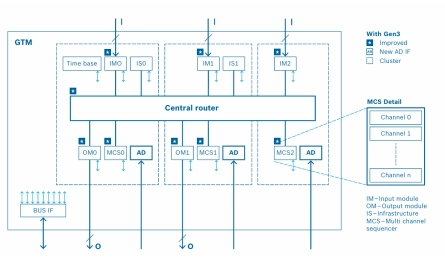
Generic timer IP
- Enables real-time control loops
- Deterministic multi-threaded architecture (8 threads per RISC unit)
- Programmability (special purpose RISC/ALU)
- Scalable and configurable architecture
-
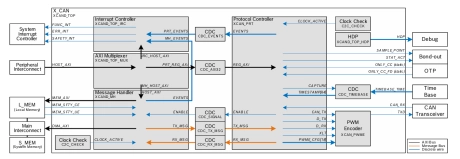
Protocol controller IP for Classical CAN / CAN FD / CAN XL
- The X_CAN is the new CAN Communication Controller IP supporting CAN XL protocol.
- It can be integrated as part of a SoC. It is described in VHDL on RTL level, prepared for synthesis.
- The X_CAN performs communication according to ISO11898-1:2015 and CiA610-1.
-
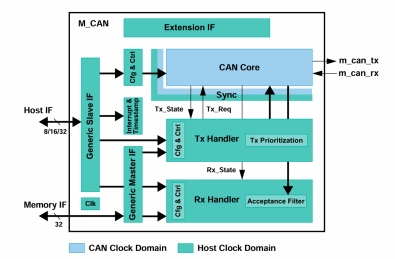
Protocol controller IP for CAN / CAN FD
- The M_CAN module is the new CAN Communication Controller IP-module that can be integrated as stand-alone device or as part of an ASIC.
- It is described in VHDL on RTL level, prepared for synthesis. The M_CAN performs communication according to ISO 11898-1:2015. Additional transceiver hardware is required for connection to the physical layer.
-
xSPI/SPI Verification IP
- Compliant to SPI Specification 512Mbit(64Mbyte) 3.0V SPI FLASH MEMORY S25FL5122
- Compliant with JEDEC JESD251A expanded serial peripheral interface specification with the help of JEDEC JESD216D-01 SFDP specification.
- Supports connection to any SPI Memory and SPI Master IP communicating with a CYPRESS spi flash memory model.
- Supports configurable timing parameters and multi-slave configurations.
