The M_CAN module is the new CAN Communication Controller IP-module that can be integrated as stand-alone device or as part of an ASIC. It is described in VHDL on RTL level, prepared for synthesis. The M_CAN performs communication according to ISO 11898-1:2015. Additional transceiver hardware is required for connection to the physical layer.
The message storage is intended to be a single- or dual-ported Message RAM outside of the module. It is connected to the M_CAN via the Generic Master Interface. Depending on the chosen ASIC integration, multiple M_CAN controllers can share the same Message RAM.
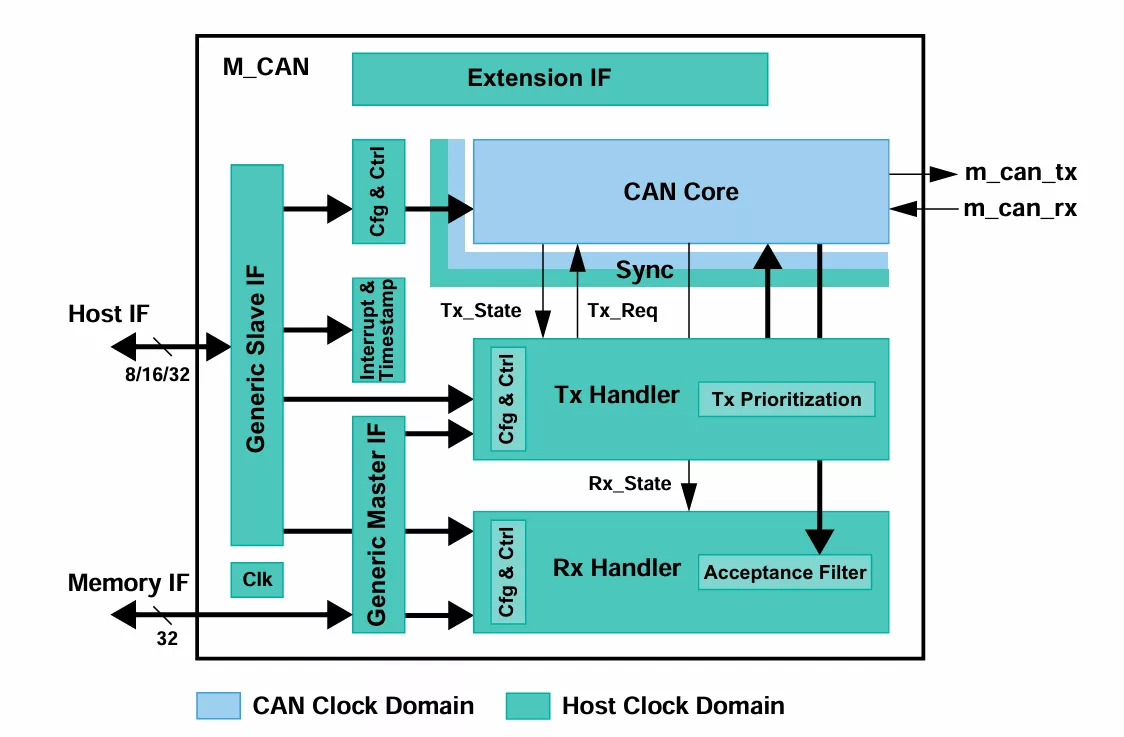
All functions concerning the handling of messages are implemented by the Rx Handler and the Tx Handler. The RxHandlermanagesmessageacceptancefiltering,thetransferof received messages from the CAN Core to the Message RAM as well as providing receive message status information. The Tx Handler is responsible for the transfer of transmit messages from the Message RAM to the CAN Core as well as providing transmit status information.
Acceptance filtering is implemented by a combination of up to 128 filter elements where each one can be configured as a range, as a bit mask, or as a dedicated ID filter.
The M_CAN can be connected to a wide range of Host CPUs via its 8/16/32-bit Generic Slave Interface. The M_CAN’s clock domain concept allows the separation between the high precision CAN clock and the Host clock, which may be generated by an FM-PLL.