CAN IP
Filter
Compare
6,492
IP
from
349
vendors
(1
-
10)
-
3.3V CAN Transceiver
- The TS_CAN_3V3_X8 is a 3.3V CAN transceiver, which supports data rates up to 1Mbps and is compatible with ISO 11898-2 compliant CAN transceivers.
- It supports a standby mode with wake up via wake-up pattern.
- The TS_CAN_3V3_X8 provides a symmetrical output signal on CANL/CANH and incorporates slope-control to improve EMI performance.
-
CAN-FD Controller
- The Controller Area Network (CAN) is a highly reliable serial bus protocol defined in the Bosch CAN specifications for standard CAN 2.0B and CAN FD, as well as ISO 11898-1:2024.
- The TES CAN Flexible Data-Rate Controller IP core is a Hardware IP core written in VHDL.
-
CAN XL Verification IP
- The CAN XL Verification IP provides an effective & efficient way to verify the CAN components of an IP or SoC.
- The CAN XL VIP is fully compliant with CAN XL specifications (CiA 610-1, CiA 610-3, 11898-1 2024, 11898-2 2024, CiA 611-1).
- The VIP is light weight with easy plug-and-play components so that there is no hit on the design cycle time.
-
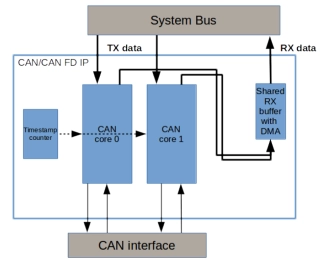
Controller Area Network with Flexible Data rate
- The XKAN module is a communication controller implementing the CAN protocol specification version 2.0 part A, B and CAN with Flexible Data-Rate protocol specification version 1.0.
- There is a 8Kbyte ram in XKAN subsystem, the ram implements filters for accept CAN base format (2.0 A) and extended format (2.0 B), receive buffers and transmit buffers.
-
Protocol controller IP for a CAN FD light responder node
- The FDLR_CAN is a CAN IP module that can be implemented in an ASIC, FPGA, and mixed-signal device.
- It supports CAN FD light responder communication according to ISO 11898-1:2024.
-
Protocol controller IP for Classical CAN / CAN FD / CAN FD light commander and CAN XL
- The XS_CAN is a low gate count CAN IP module that can be realized as stand-alone device, as part of an SoC, as part of an ASIC, or on an FPGA.
- Safety Element out of Context (SEooC) according to ISO 26262-11:2018 Clause.Developed according to the automotive cybersecurity standard ISO 21434.
-
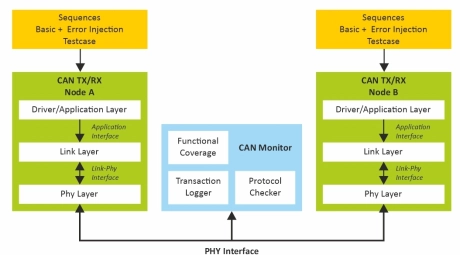
Verification IP for CAN XL, FD and CAN 2.0
- A comprehensive VIP solution portfolio for CAN XL, CAN FD and CAN 2.0 used by SoC and IP designers to ensure comprehensive verification, protocol and timing compliance.
- CAN-Xactor implements a complete set of models, protocol checkers and compliance test suites in 100% native SystemVerilog and UVM.
-
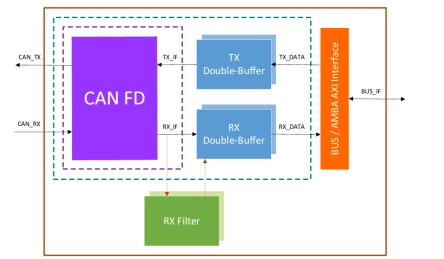
CAN 2.0/CAN FD IP core
- The IP is compliant to the new ISO 11898-1:2015 standard, supporting both standard CAN and CAN FD.
- The IP is available for most Xilinx, Altera, Lattice and Microsemi FPGA devices, supporting native bus interfaces like AXI, Avalon and APB. Processor integration is available for SOC type of FPGAs.
-
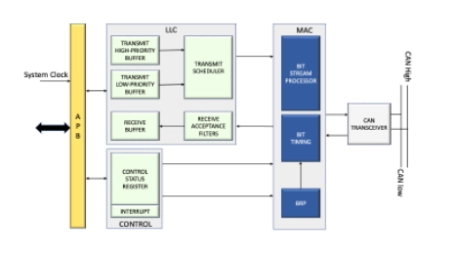
CAN FD Bus Controller IP
- The Controller Area Network – Flexible Data (CAN-FD) Controller IP implements the CAN 2.0A, CAN 2.0B as well as the high-performance CAN-FD (Flexible Data Rate) protocols.
- It is compliant to both Non-ISO CAN-FD from BOSCH as well as ISO11898-1:2015 DIS. It can be integrated into devices that require CAN connectivity commonly used in automotive and industrial applications.
-
CAN FD LIGHT BUS CONTROLLER IP
- The Controller Area Network – Flexible Data-Light (CAN-FD Light) Controller IP implements the CAN FD-Light (CIA 604-1) protocol.
- It can be integrated into devices that require CAN-FD-Light connectivity commonly used in sensors and actuators for the automotive and industrial applications.