The Controller Area Network (CAN) bus, originally developed for the car industry, is a fast, reliable and cost-effective data bus for multi-master and real-time applications. In addition to automotive applications, it is widely used in applications such as factory automation, machine control, building automation, maritime, medical, railway and avionics. The iniCAN core first was introduced to the market in 1994 and since then is used in a lot of different applications.
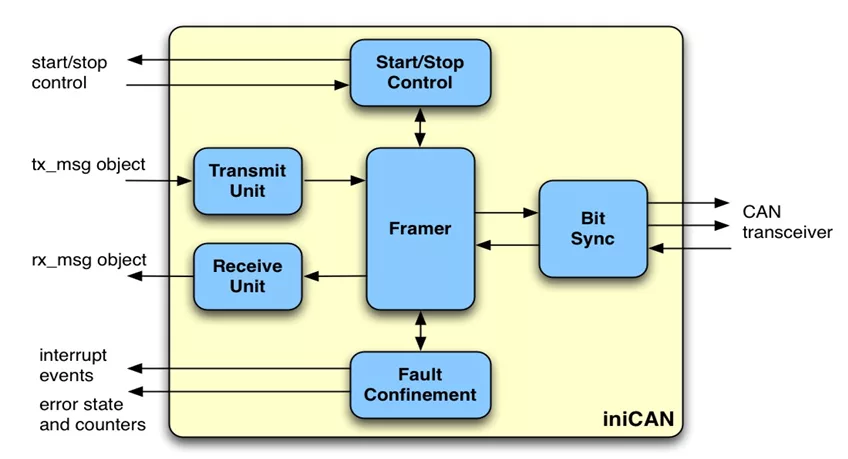
The iniCAN core contains all the low-level CAN protocol handling. The core contains the complete data link layer, including the framer, transmit and receive control, error handling, error reporting and bit synchronization. Simple message level transmit and receive interfaces facilitate smooth system integration. The core provides status on error counts and events as well as a low-level frame reference pointer which identifies the current bit position within a CAN frame. This feature comes in handy when developing CAN protocol analyzers or if detailed reporting on the bit-level is required.