What Makes Ethernet IP Truly Automotive-Grade

Introduction
Ethernet entered the vehicle as a bandwidth solution. That framing was accurate and useful for a while as legacy networks like CAN and LIN were never designed to carry camera streams, radar data, or over-the-air software updates. Ethernet solved that problem.
But the vehicle architecture has kept moving. Zonal controllers, central compute platforms, and software-defined vehicle concepts have turned Ethernet from a high-bandwidth pipe into the primary communication fabric of the car. It now carries traffic that has direct implications for timing, safety, security, and diagnostics, not just data volume.
That shift changes what automotive-grade Ethernet IP needs to deliver. Bandwidth remains necessary. It is no longer sufficient.
This blog examines what separates truly automotive-grade Ethernet IP from generic implementations across functional safety, time-sensitive networking, security, observability, lifecycle management, and the integration disciplines that only become visible once a program is deep into development.
The Architecture Has Changed. The IP Requirements Have Changed with It.
Traditional vehicle architectures distributed intelligence across dozens of ECUs, each managing a narrow function over a dedicated bus. The network was simple because the topology was simple.
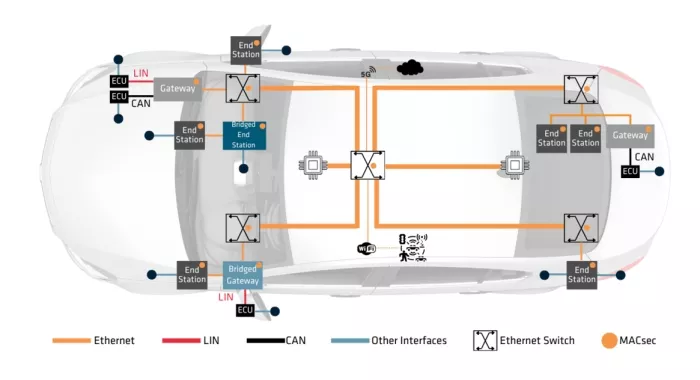
Modern platforms consolidate those functions into domain controllers, zonal controllers, and centralized compute units. Fewer nodes handle more functions, and more of the vehicle’s critical communication passes over a smaller number of Ethernet links. A single zonal controller may simultaneously carry sensor aggregation traffic, control commands, diagnostic frames, time synchronization messages, and encrypted update payloads all on the same physical network.
This convergence is exactly what Ethernet and TSN were designed to enable. It is also what makes the choice of Ethernet IP consequential in a way it was not five years ago.
A fast Ethernet block that passes traffic in a clean test environment is easy to find. An Ethernet block that behaves predictably when those traffic types compete for bandwidth, when synchronization is disturbed, when a security event occurs, or when the integration team needs to understand exactly what happened, that is a much harder specification to meet.
Vehicle network evolution: from dozens of isolated ECUs on dedicated buses to a converged Ethernet backbone with zonal and domain controllers
Standards Compliance Is the Starting Point, Not the Destination
No serious automotive Ethernet IP discussion starts without standards compliance — IEEE 802.3, 802.1AS, 802.1Qbv, 802.1Qav, 802.1CB, 802.1Qci, and 802.1AE. These standards define the baseline behaviour every automotive node must implement correctly. Without them, interoperability is impossible and the rest of the design cannot proceed.
But compliance answers a limited set of questions. It tells you the IP implements a standard correctly under defined conditions. It does not tell you how the IP behaves under congestion, how it reports errors, what internal states are visible, how fault conditions are handled, or whether the surrounding system can trust the information the IP provides.
The integrator’s real questions begin where the compliance certificate ends.
What does “TSN-compliant” mean?
TSN is not a single feature; it is a collection of IEEE standards, each addressing a different aspect of deterministic Ethernet. A sensor endpoint needs time synchronization (802.1AS) and possibly credit-based shaping (802.1Qav). A zonal controller needs time-aware scheduling (802.1Qbv) and per-stream filtering (802.1Qci). A central gateway or switch needs all of that plus frame replication for redundancy (802.1CB) and advanced queue management. “Supports TSN” without specifying which mechanisms are implemented, how they are configured, and what they cost in area and power is not a useful technical claim.
The table below maps vehicle node types to the TSN standards most relevant to each:
|
Vehicle Node Type |
Core TSN Requirements |
Notes |
| Sensor endpoint (camera, radar, lidar) | 802.1AS (sync), 802.1Qav (CBS) | Lean data path; low area budget |
| Zonal controller | 802.1AS, 802.1Qbv (TAS), 802.1Qci | Traffic shaping + stream policing |
| Domain controller / gateway | 802.1AS, 802.1Qbv, 802.1CB, 802.1Qci | Redundancy + filtering critical |
| Central compute / high-perf SoC | Full TSN suite + statistics + management | Switch fabric + endpoint combined |
Comcores switching IP offers support for the following TSN standards: 802.1AS-2020, 802.1Qbv, 802.1Qav, 802.1CB, 802.1Qci, 802.1Qbu/br, and 802.1Qbr. The endpoint IP offers support for 802.1AS-2020 as a default, but other TSN features are offered in special configurations as well. Each standard is independently configurable to match the application’s node type without carrying the silicon cost of unused mechanisms.
🔧Technical Sidebar — For SoC Architects
TSN Configuration and Timing Assumptions
Every TSN feature that is optionally enabled changes the timing behaviour of the Ethernet subsystem. Time-Aware Scheduling (802.1Qbv) introduces gate control cycles that must be aligned to the network’s global time domain. Credit-Based Shaping (802.1Qav) affects burst behaviour across traffic classes. Per-Stream Filtering and Policing (802.1Qci) adds per-frame state machines that contribute to worst-case latency.
In an automotive IP, each of these should have documented timing assumptions that are explicit and configuration-specific, not buried in a generic appendix. When verifying your SoC, you need to know: given this TSN configuration, what is the maximum frame processing latency, what are the queue depths, and what counters expose congestion events to firmware?
Comcores’ TSN IP supports cut-through operation to minimize latency and exposes specific counters, queue visibility registers, and interrupt mechanisms per traffic class, allowing firmware to detect congestion, synchronization drift, or queue overflow events before they propagate into ADAS pipeline timing violations.
Functional Safety: The Engineering Work Behind the Safety Case
Every automotive program has a safety team whose job is to build a credible, auditable argument that the system meets its ASIL target. They need an IP that was built with safety in mind and a supplier who helps them get the right materials to do their job.
That is exactly where the IP supplier’s role is most concrete.
An Ethernet IP core does not make a vehicle safe by itself. Safety is a system-level outcome, achieved through hazard analysis, safety goal definition, architecture decisions, and a verification process that spans the full development program. But the IP supplier can either make the safety team’s work significantly easier or leave them to figure it out on their own.
Comcores’ automotive Ethernet IP is architected for ASIL certification from the ground up. That means the safety engineering is done, based on ISO 26262 at the IP level before it reaches the customer’s program, so integration teams are not reverse engineering the design to understand its fault behaviour. They start with a foundation that is already structured for their safety workflow.
🔧Technical Sidebar — For SoC Architects
Safety Mechanisms Inside the Ethernet IP
For an Ethernet IP block to contribute meaningfully to a system-level ASIL target, it needs to implement internal safety mechanisms that detect and report faults and not hide them. Typical mechanisms at the IP level include:
- Register protection (parity or ECC on configuration registers to detect corruption)
- Memory protection (ECC on internal FIFOs and descriptor rings)
- Watchdog/heartbeat mechanisms for detecting IP lockup conditions
- CRC error detection and reporting at the MAC layer, with counter exposure
- Timestamp integrity checks in the PTP/IEEE 1588 path
- Interrupt-driven fault notification to allow firmware to respond within a bounded time window
Comcores implements ECC on all data stored in embedded memories, address checking logic for the embedded memories and dual lock-step operation for safety critical functions with fault detection coverage reflected in FMEDA data. Each mechanism is documented in the Safety Manual with its diagnostic coverage contribution and the firmware response expected to achieve that coverage.
Security Must Coexist With Timing — Not Fight It
MACsec (IEEE 802.1AE) is the Layer 2 security mechanism most relevant to in-vehicle Ethernet. It provides frame-level encryption, authentication, and replay protection between directly connected nodes, and it does so at a point in the data path close enough to the physical layer to make it attractive for automotive use cases where low latency matters.
The appeal is real. So is the integration complexity.
MACsec adds processing overhead to every frame. Where that overhead is absorbed determines whether the predictable timing of the TSN network stays intact or is disrupted. This is not a theoretical concern — it is one of the most common integration surprises in automotive Ethernet programs.
The placement problem: MACsec can be integrated above the MAC layer (between the MAC and the higher-layer software stack) or below it (between the MAC and the PCS/PMA, at the media-independent interface). Each placement has consequences:
- Above-MAC placement is simpler to integrate and keeps the MAC’s TSN mechanisms unaffected. However, it means the MAC timestamps frames before encryption, and the decrypted frame at the receiver may have a different timing relationship than expected.
- Below-MAC placement exposes the MACsec engine to the raw media interface and can affect the MAC’s ability to support 802.1QBu and 802.3br frame pre-emption, which directly impacts the timely delivery of critical traffic.
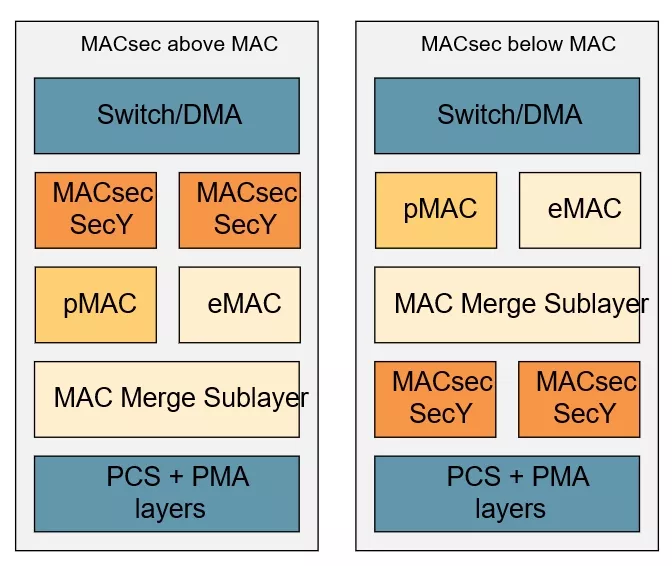
Different MACsec placements
The right choice depends on the node’s timing requirements, traffic mix, and whether the application is an endpoint, a bridge, or a gateway with a switch fabric.
Comcores’ MACsec IP is designed for integration with its TSN endpoint and switching IP and comes in an ultra-optimized version only targeting 10M End-stations and a more generic version that covers speeds up to 2.5 Gbps, with specific placement options being above/below MAC. The implementation is aligned with the OPEN Alliance Automotive MACsec Specification, ensuring interoperability across the in-vehicle network, and is optimized for minimum silicon footprint, making it viable for constrained end-station nodes where other implementations carry prohibitive area cost.
What to verify in any MACsec + TSN integration
Does the MACsec engine preserve the MAC’s egress and ingress timestamps? Does it add deterministic, bounded latency overhead or variable overhead that changes with frame size and key state? Are security events (replay detection, authentication failure, key expiry) exposed through the same status/interrupt path as TSN diagnostics, or are they isolated in a separate software domain that creates blind spots?
🔧Technical Sidebar — For SoC Architects
MACsec Overhead and TSN Timing Budget
MACsec adds a SecTAG (16 bytes minimum) and an ICV (integrity check value, 16 bytes for AES-GCM-128) to every protected frame, increasing frame size by a minimum of 32 bytes. On a 10BASE-T1S link, this represents measurable bandwidth overhead. On a 1000BASE-T1 or 2.5G link, the bandwidth impact is lower, but the latency impact (the time the MACsec engine holds a frame for encryption or decryption) must be accounted for in the TSN timing budget.
Comcores’ MACsec solution uses a backpressure scheme to accommodate for the additional overhead introduced by the MACsec protection. Cut-through operation is utilized to minimize the latency contribution of MACsec and to ensure the TAS gate schedules defined for TSN traffic classes are not perturb.
This is documented in the integration guide and reflected in the timing parameters provided to the SoC architect.
Observability: The Feature That Earns Its Value Under Pressure
When Ethernet works, throughput and latency are the metrics people watch. When Ethernet does not work or when something in the ADAS pipeline behaves unexpectedly, or when a field diagnostic reveals anomalous frame loss, observability becomes the difference between a one-hour debug session and a two-week investigation.
Observability in an Ethernet IP block means the system can answer specific questions from software:
- Was a frame dropped? Which queue? Why congestion, policing rule, security failure, or link error?
- Is time synchronization within bounds? Is the offset trending in a direction that will eventually violate the timing budget?
- Did a security event occur? Was it an authentication failure, a replay attempt, or a key management issue?
- Is queue occupancy increasing on a specific traffic class? Is a lower-priority class being starved?
- Has a configuration register been corrupted since the last reset?
These questions cannot be answered by aggregate status registers. They require per-queue counters, timestamped error logs, per-stream statistics, interrupt prioritization by event type, and, in safety-relevant contexts, the ability for the diagnostic layer to distinguish between a transient fault and a permanent failure mode.
Comcores’ automotive Ethernet IP provides per-queue drop counters / IEEE 802.1AS timestamp capture resolution / security event registers / per-stream statistics. This observability layer is documented in the register map and integration guide and is designed to support both firmware-level diagnostics during development, production and operation phases.
Lifecycle: The Requirement That Arrives Late and Stays Longest
A vehicle SoC may spend two to four years in development before it reaches a production vehicle. That vehicle may remain in production for five to eight years. And the OEM’s service obligation extends for a decade or more after the last vehicle rolls off the line.
That is a potential 15 to 20-year horizon from first IP integration to end of service support. Within that window, the IP supplier needs to provide more than RTL.
What automotive lifecycle support requires:
- Version control and configuration management — the ability to reproduce an exact IP configuration from any point in the program history, including the version used at type approval
- Error management — a formal process for identifying, documenting, and communicating silicon errors, with clear guidance on which errata affect which configurations and what firmware workarounds apply
- FPGA-to-ASIC migration — many automotive programs prototype on an FPGA before moving to ASIC tape-out. The IP must support both targets without forcing a reintegration, re-verification, or re-qualification effort at the transition.
- Documentation currency — register maps, timing parameters, safety manuals, and integration guides must remain accurate and accessible throughout the program, not just during the initial integration phase.
- Long-term support commitment — the IP supplier must be a viable partner across the full program horizon, capable of providing technical support, responding to field issues, and maintaining the safety documentation chain
Comcores supports FPGA and ASIC implementations from the same IP baseline, with version control process / error management policy / long-term support commitment period. The Omni500 hardware evaluation platform provides a validated FPGA integration path that reduces risk at the ASIC migration stage.
Configurability: Flexibility That Doesn’t Compromise Verifiability
Different automotive nodes have genuinely different requirements. A compact sensor endpoint should not carry the silicon footprint of a central gateway switch. A zonal controller does not need the statistics and management capability of a high-bandwidth backbone node. Configurability is not optional; it is how IP suppliers serve a market where the range of node requirements spans three orders of magnitude in complexity.
But configurability introduces risk if it is not managed carefully. Every optional feature changes timing behaviour, affects verification scope, alters safety assumptions, and potentially changes what the firmware needs to do. An IP block that can be configured in hundreds of combinations but has only been verified in a handful of them is not a flexible IP; rather, it is an integration liability.
Automotive-grade configurability means:
- Each optional feature is independently documented with its timing implications
- Supported configurations are explicitly identified and verified.
- Unsupported or untested combinations are flagged, not silently enabled.
- Safety assumptions are configuration-specific, not generic.
- Area and power estimates are available per configuration to support SoC budgeting.
Comcores’ configurable Ethernet IP is structured around parameter-driven RTL and documented supported combinations, with timing and safety documentation scoped to the specific configuration selected. This is not a generic “configure anything” approach, it is a disciplined configurability model designed for programs that need to verify and certify what they build.
What to Ask Any Ethernet IP Supplier
Feature tables are a starting point. The questions below are where the real evaluation happens:
On safety |
| • What does your safety package actually give my safety team — and how much of their analysis work does it reduce? • Is the IP architected with safety mechanisms that are documented clearly enough to feed into a system-level FMEDA? • What are the integration assumptions and constraints the safety team needs to know before they start? |
On TSN |
| • Which specific IEEE TSN standards are implemented? Which are optional and which are mandatory in your baseline? • How are TSN configuration options documented — individually, with per-option timing assumptions? • What happens when queues overflow? How does the IP report it, and on what latency? |
On security |
| • Where in the data path does MACsec sit relative to the MAC and the TSN mechanisms? • What is the maximum bounded latency contribution of the MACsec engine per frame? • Are security events (authentication failure, replay detection) exposed through the same observability path as network diagnostics? |
On lifecycle |
| • How do you manage errata across a 15-year automotive program horizon? • Does the same IP baseline support FPGA prototyping and ASIC production, or is migration a reintegration effort? • What does your long-term support commitment look like after initial delivery? |
On observability |
| • What counters, status registers, and interrupt mechanisms are available per traffic class? • Can the diagnostic layer distinguish between a congestion event, a security failure, and a synchronization drift condition? • How is the register map documentation maintained through IP version updates? |
Comcores’ Position in This Landscape
Comcores is a focused automotive Ethernet IP provider, not a broad EDA platform with an Ethernet block in a large portfolio, and not a silicon vendor where Ethernet is one feature of a fixed-function chip. That focus matters because automotive Ethernet IP is now complex enough that generic implementations leave gaps that only become visible during integration, safety analysis, or long-term support.
Comcores’ portfolio spans TSN endpoint IP (including the industry’s smallest-footprint TSN End Station Controller), TSN switching and gateway IP, MACsec security IP compliant with the OPEN Alliance Automotive MACsec Specification, IEEE 802.1AS PTP timestamping, and complete subsystem solutions combining these elements for key automotive network nodes.
The Omni500 hardware evaluation platform provides a validated, hardware-proven integration path that reduces FPGA prototyping risk and accelerates the path to ASIC.
Automotive Ethernet is no longer a peripheral feature of vehicle design. It is the communication infrastructure on which software-defined vehicle platforms depend. The IP that carries that infrastructure needs to be dependable not just in nominal operation, but under congestion, fault conditions, security events, and across a program lifecycle measured in decades.
That is the standard Comcores, and its IPs are built to meet.
Explore Comcores’ configurable Ethernet, TSN, MACsec, switching, and endpoint IP solutions for automotive FPGA and ASIC platforms.
Related Semiconductor IP
- Deep Buffering Memory 1G Ethernet Switch
- Ethernet Controller
- 10M MACsec
- MAC Privacy Protection IP
- Automotive Ethernet Verification IP
Related Blogs
- LPDDR4: What Makes It Faster and Reduces Power Consumption
- Meeting the World's Growing Bandwidth Demands with a Complete 1.6T Ethernet IP Solution
- What Makes FPGA Architecture Ideal for Ultra-Low-Latency Systems?
- Automotive Ethernet with Comcores – Safety, Quality and ASIL certification of IP
Latest Blogs
- Reprogrammable Post-Quantum Security for SoCs: Why Crypto-Agility Matters
- Designing the Beam Steering Core for a C-Band AESA: A Look at VSI's VBF0644 GaAs Beamformer IC
- Secure Boot for embedded systems: Building a complete chain of trust
- Understanding PCIe 6.0 Power States: L0p vs L0s vs L1
- Crypto mining SoC unearths a need for custom IP